






ESP32-C3 Mini Development Board - Unsoldered
Accurate sensor and breadboard ready



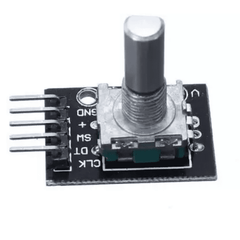

Rotary Encoder Module
Let us know!
We'll try to match the price for you

Couldn't load pickup availability




The Rotary Encoder Module Brick Sensor is a rotary input device (as in knob) that provides an indication of how much the knob has been rotated AND what direction it is rotating in. This Brick Sensor is a great device for stepper and servo motor control. You could also use it to control devices like digital potentiometers.
M274 360 rotary Degree encoder, is an incremental electro-mechanical device that converts the angular position or motion of a shaft or axle to digital code. The output of incremental encoders provides information about the motion of the shaft, which is typically further processed in processor/controllers into information such as speed, distance, and position.
read more : What are Rotary Encoders? Construction & Working
| Model | KY-040 |
| Cycles per revolution (CPR) | 20 |
| Working voltage | 0 – 5V |
| Material | PCB + Brass |
| Dimensions | 3 x 2 x 1cms |
| Weight | 25 grams |