










Accurate sensor and breadboard ready
✨ Use RCAPP
and get 5% off 👇



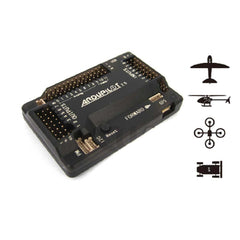
APM 2.6 Flight Controller Board
Let us know!
We'll try to match the price for you
We’ll notify you once the product is back in stock.

Couldn't load pickup availability







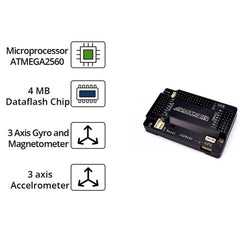
The APM 2.6 flight controller board is one of the first open-source autopilot systems to use invensense's 6 DoF Accelerometer/Gyro MPU-6000. This flight controller features an onboard 4 MegaByte data flash chip for automatic data logging, optional off-board GPS, and a uBlox LEA-6H module which is compatible with Arduino. This revision of the board has no onboard compass, which is designed for vehicles (especially multicopters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference.

| Model | APM 2.6 |
| Board Type | Flight Controller Board |
| Chip Used | Atmel's ATMEGA2560 and ATMEGA32U-2 |
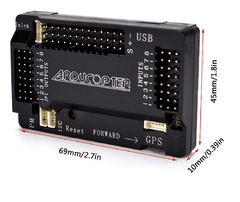
| Dimensions | 6.9 x 1 x 4.5cms |
| Weight | 50 grams |